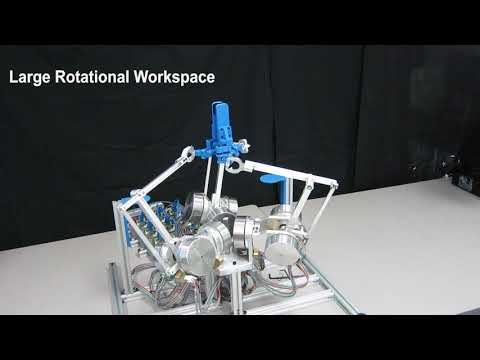
This video demonstrates the operation of a novel backdrivable kinematically redundant (6+3)-dof spatial hybrid parallel robot. This robot has a very large translational and orientational workspace. Redundancy is used to completely alleviate singularities and to operate a gripper without having to mount any actuator on the moving platform. The parallel hybrid architecture yields high dynamic capabilities, as demonstrated in the last part of the video. Links to related research articles: - Concept of the general architecture (RA-Letter): https://ieeexplore.ieee.org/document/8763981 - The robot design and analysis (ICRA-2019): https://ieeexplore.ieee.org/document/8793772 - The forward kinematic analysis (Journal of Mechanisms and Robotics-2020) : https://asmedigitalcollection.asme.org/mechanismsrobotics/article-abstract/12/6/061008/1083619/Forward-Kinematic-Analysis-of-Kinematically?redirectedFrom=fulltext Link to related video: - Human-robot interaction : https://youtu.be/29pGFE3Xy2M
Source: Laboratoire de robotique de l'université Laval / Laval University Robotics Laboratory YouTube channel video.
Comments